
The animation pipeline is one of the most crucial elements of our development process. The animations constitue the main input for the robot to generate corporal movements with emotional intention. On the other hand, those animations must be dynamically integrated on the interface we are building. To achieve high polished but flexible animations we had to come up with a concept that fit this constraints. After several discussions and research we decided that all our animations would be rule by two main attributes. Openness and Intensity.
Openness
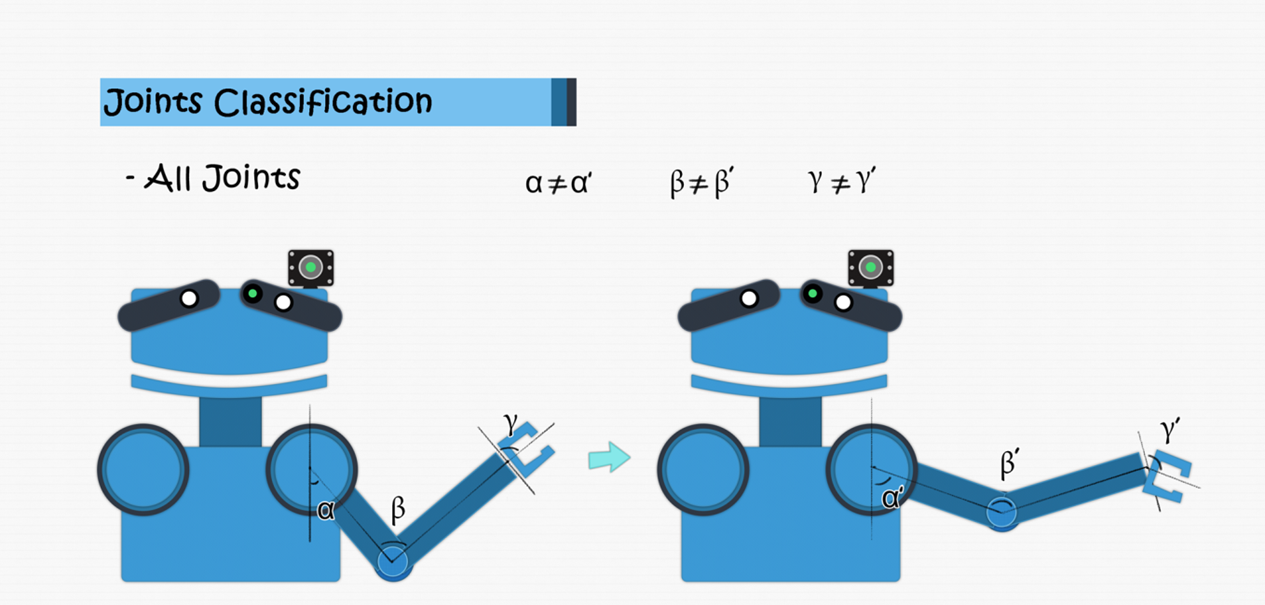
The concept of openness refers to the diferent ranges of trajectories within an specific joint. For instance, imagine a scale from 1-10 fixed to the openness of your own hand. 1 would be a value in which you hand is completely closed (fist position) and 10 would be a value in which your hand would be completel opened (open hand palm).
We can see the concept illustrated in the following image.
Intensity
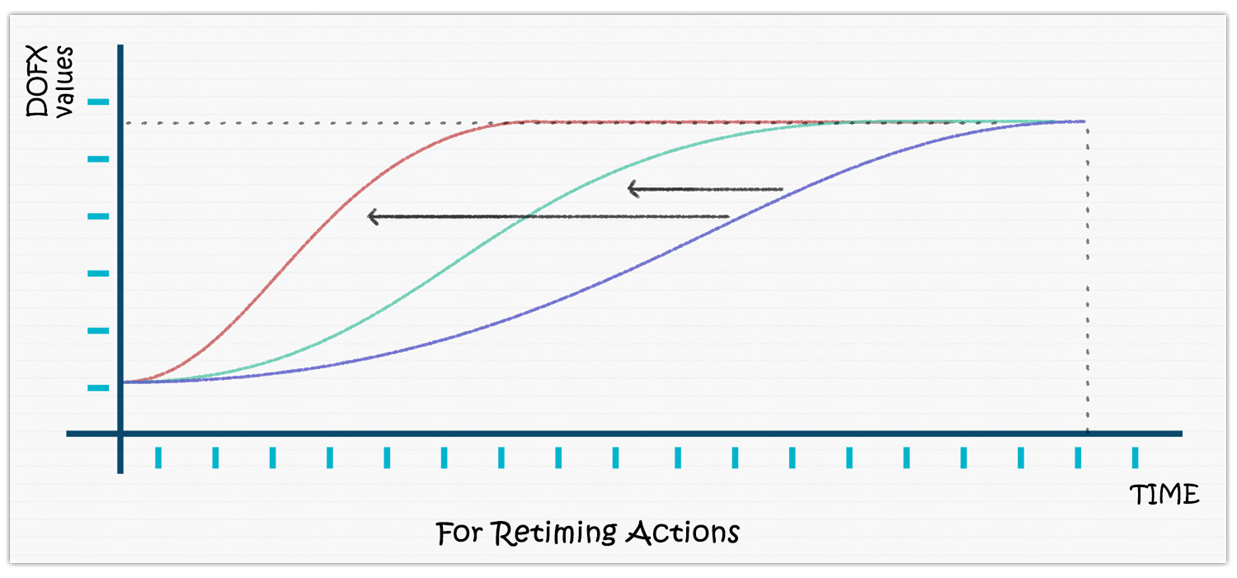
The concept of intensity refers to the velocity of the trajectories within a line of joints. For instance, imagine the same scale we used in the openness example, but now the values are not going modify the position but rathe the speed of certain joints movements. In this case a 1 would be a very slow and mild movement and 10 would be a very fast and aggressive movement.
We can see the concept illustrated in the following image in which we can see a representation of the different curves / keyframe values.
In conclusion, when working in projects that required animations to be dynamically pushed into physical animated objects, is very important to create high end concepts that can be scaled down and applied to each specific animation.