We still have Maker Faire to look forward to post-graduation, but otherwise, this project is complete. Or at least, it has gone as far as we will be taking it ourselves.
For anyone interested in building smart beach balls of their own, our documentation is available online! We hope others will follow in our footsteps and keep the fun going.
Final changes are in the works! We ordered new beach balls to replace leaky ones, and final pieces are being soldered in place.
We have new WiFi antennas to help improve signal directionality issues. After building adapters to attach them to our existing boards, the results look promising! We will be conducting another full scale test shortly.
We also finished our promotional videos, so be sure to check those out on our media page!
Finally, our written documentation on everything we’ve learned during the project is well underway. We will be giving our final presentation and demonstrations next week. The semester is quickly coming to a close.
This week was a crazy push to get everything working [mostly] reliably before Soft Opening, and we did it!
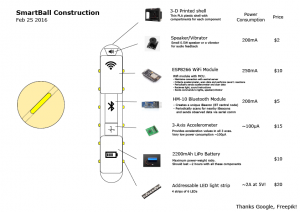
We got all of our 3D printed shells, which has helped significantly with a proper hardware setup and loading the hardware into the balls.
We also programmed four relatively simple activities:
Air-Time Competition
This is a relatively simple accelorometer test for a single ball. The ball lights up when it is in free-fall, and sends information about how long it was airborne to the server.
Virus Game
This is the virus game exactly as we previously envisioned. One ball starts as the “infected” ball, and it can infect other balls it gets close enough to.
Simon
Another proximity based activity, balls change color based on how many are gathered together.
Lawn Bowling
Similar to the game of lawn bowling or bocce ball, one balls acts as a target while the player rolls another one towards it. The ball that is rolled changes color based on how close it is to the other ball when it stops moving.
During Softs, we were finally able to let people play with the balls and show off this variety of activities. They all seemed intrigued by the idea and the potential for scaling it up.
Using the WiFi chip as a proximity sensor is still a bit unreliable since it does not emit/detect signal in every direction equally. However, we have been able to resolve most other issues. New, more expensive batteries helped the balls keep running for hours, and soldering on the final pieces will negate any lose wiring.
We are looking for ways to tweak those last few problems before finals, and potentially expand on our games and our number of balls.
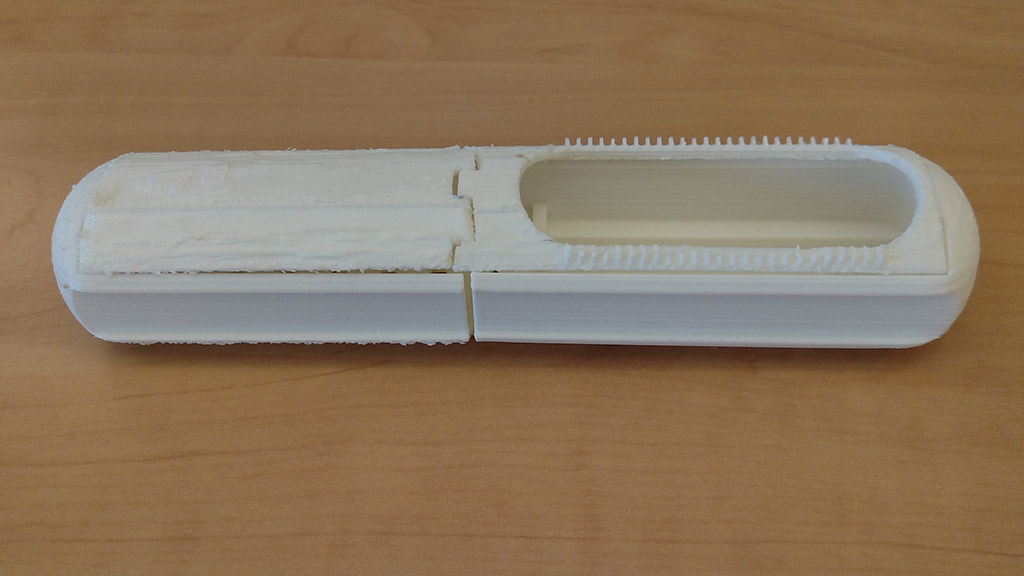
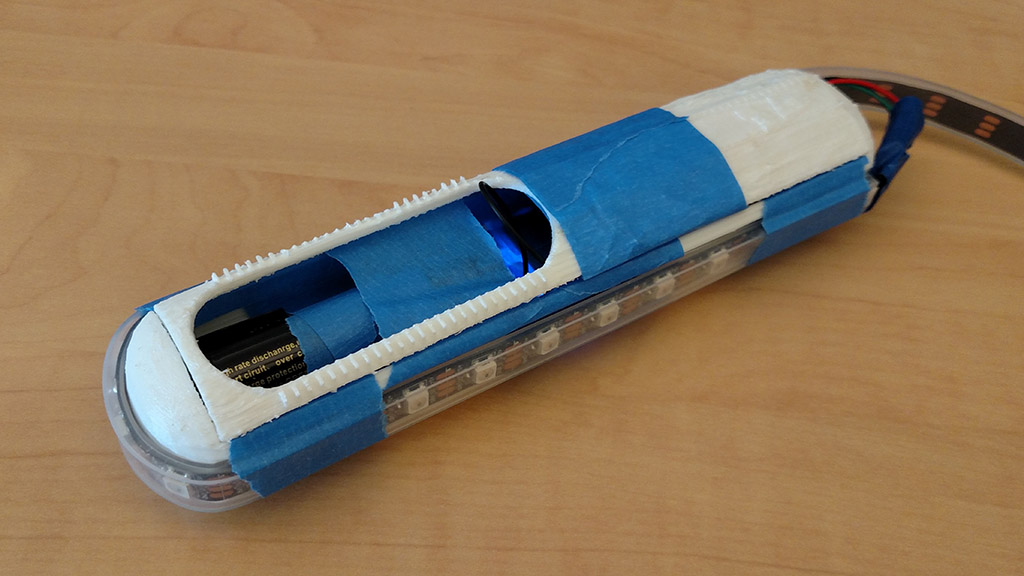
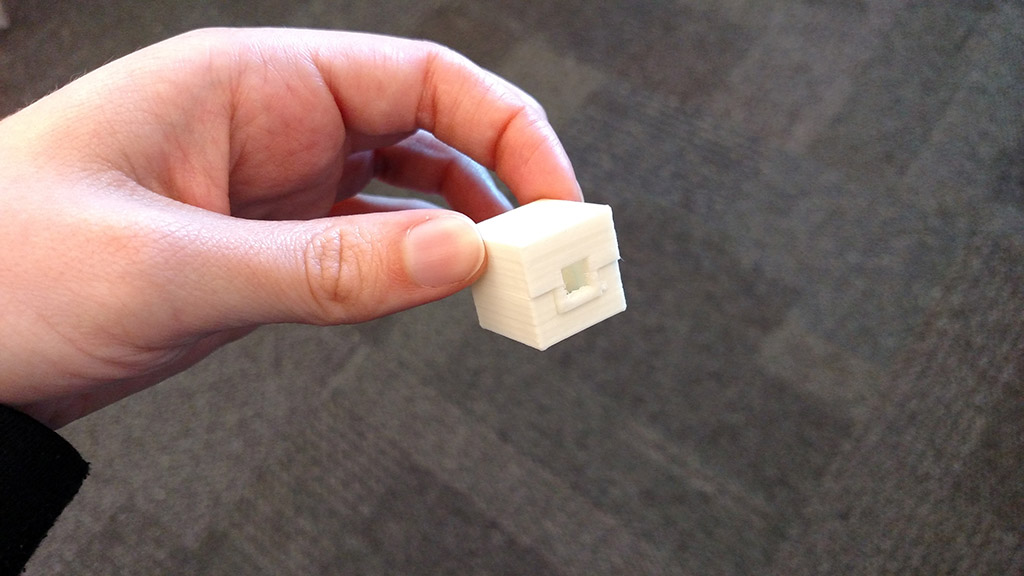
This week, after great difficulty, we finally have our first complete 3D printed shell! This shell uses our updated design, which is much sleeker than our initial print. The walls are thinner, it has been scaled down to only what our hardware needs, and empty space has been removed by making an elliptical shape rather than a perfect cylinder.
The print quality wasn’t perfect, and it took some work with the dremel tool to get the left and right halves to actually fit together. However, the shell does an excellent job of holding the hardware neatly inside, and it all fits easily into our beach balls.
Our first complete shell.
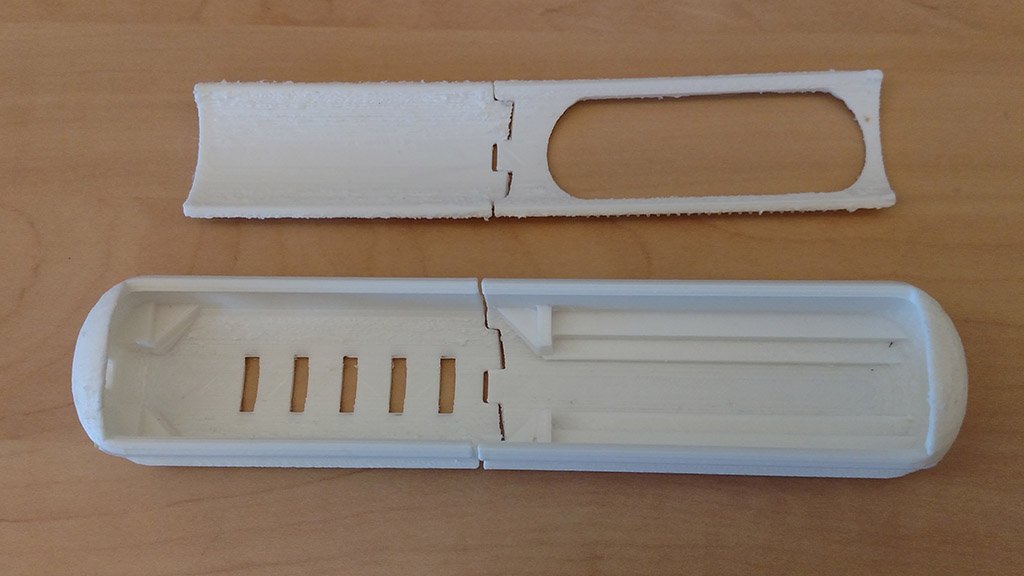
Internal supports hold the circuit board and battery.
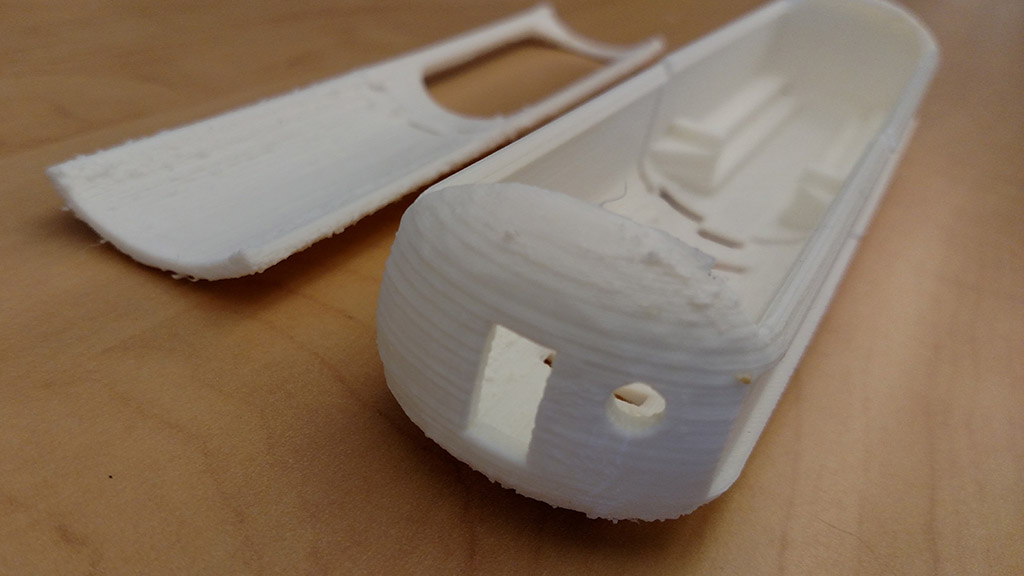
Holes allow for an external power switch and LED wiring.
The external grooves help hold the light strip.
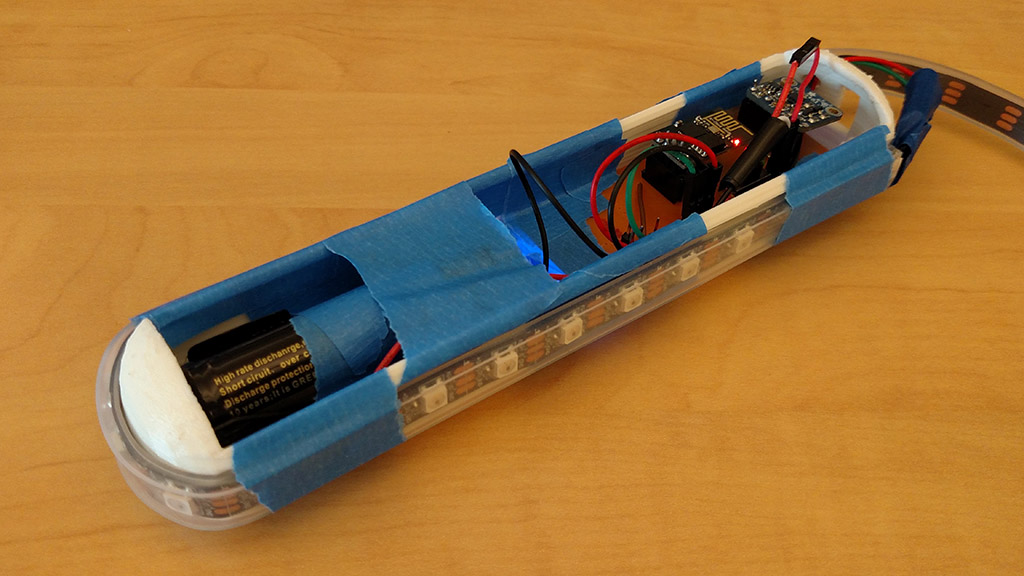
Everything fits nicely in the closed shell.
It’s alive!
We have now outsourced our 3D shell manufacturing to a local printer via 3D Hubs. This should give us quality prints with fewer complications and a faster turnaround time than we could manage ourselves. Their machine can also handle larger prints, so we can have solid top and bottom pieces instead of having to print it in quarters that need additional securing.
We are still facing difficulties with the functionality of the balls, however. Some of the chips have gone bad, and we have ordered replacements. We currently have parts for 4 complete balls. Unfortunately, there seem to be problems with the networking with multiple balls involved and large quantities of messages being sent. The team is working to debug and resolve these issues as quickly as possible.
On the plus side, the balls look great, and our basic Virus Game works well when the balls actually do maintain their connections properly.
Printed core inside a ball.
Saturday is CMU West’s Carnival, and we’ll be there demoing what we have. Next week, we will be focusing on preparations for Thursday’s Soft Opening and the push to Finals.
The team is still trying to resolve our WiFi based proximity detection issues. We did manage to find a new type of WiFi chip that might yield better results. That should be delivered in time for next week. In the meantime, we are still trying to improve the performance of what we have in case the new chip doesn’t work out.
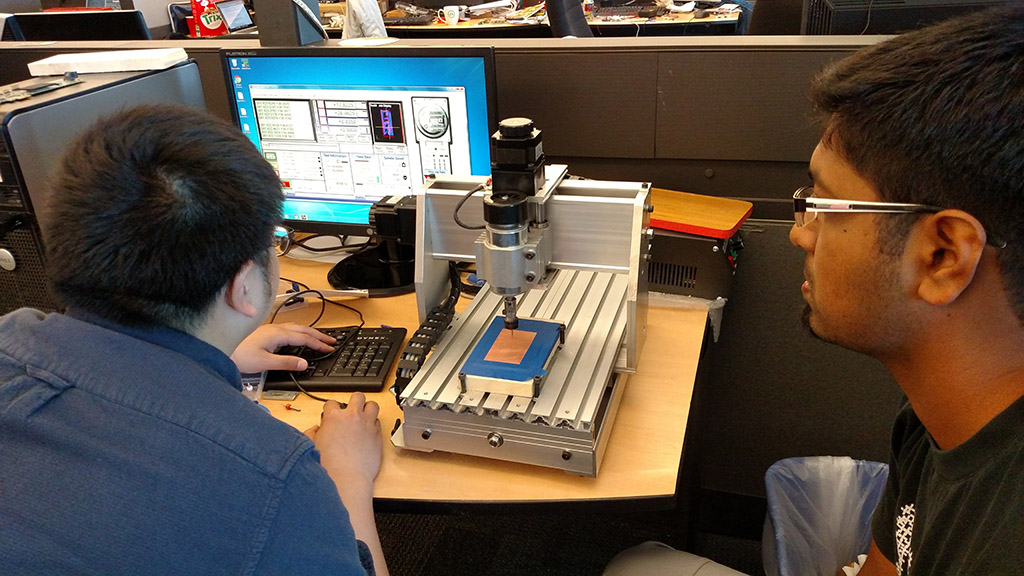
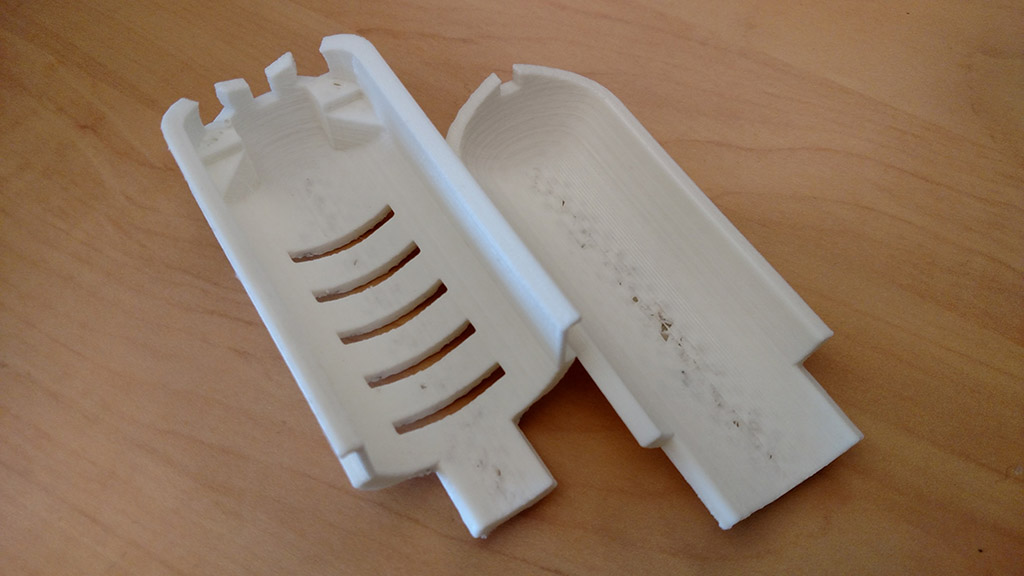
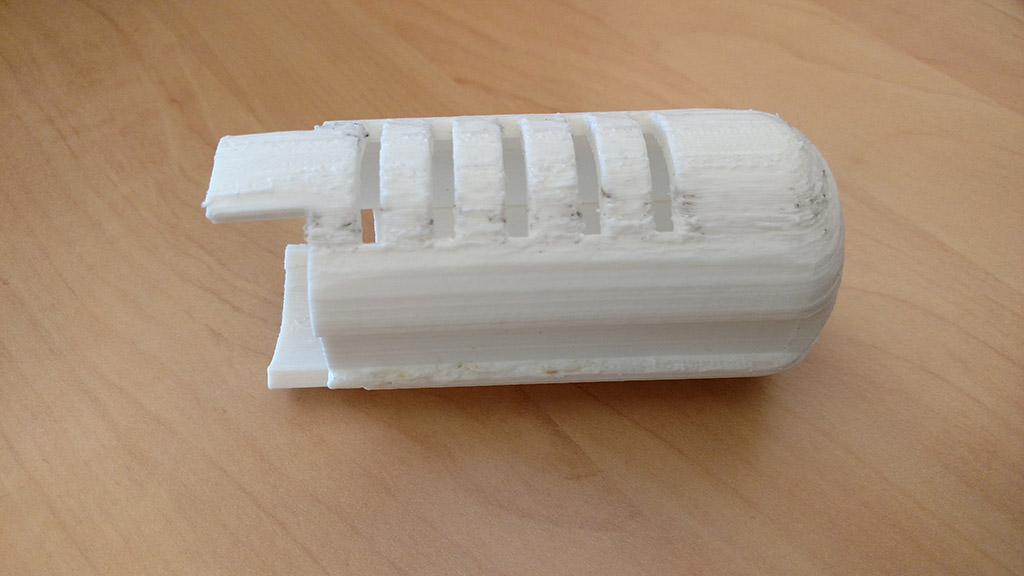
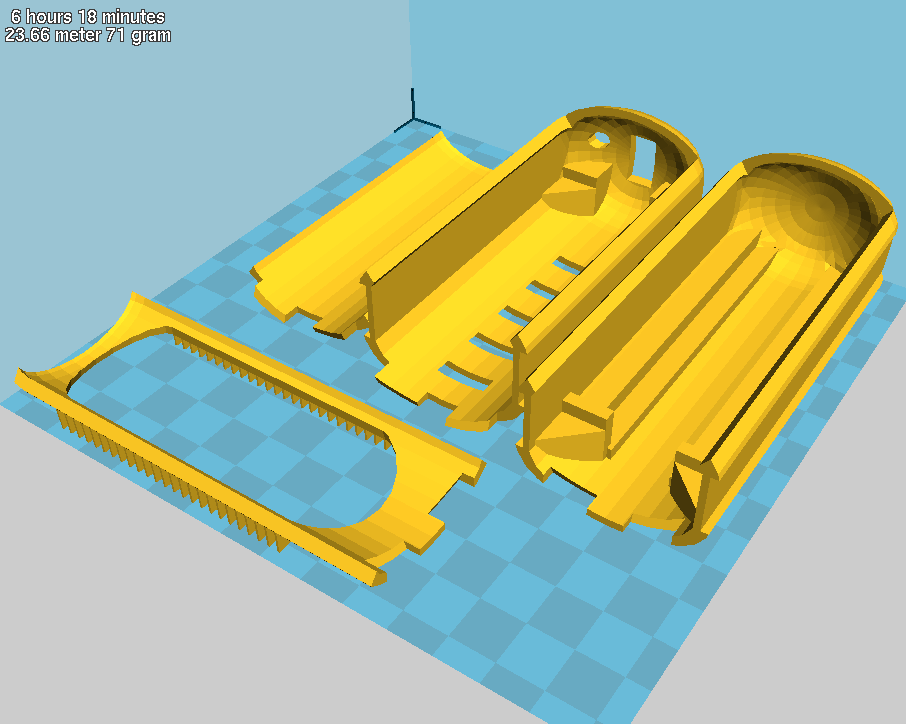
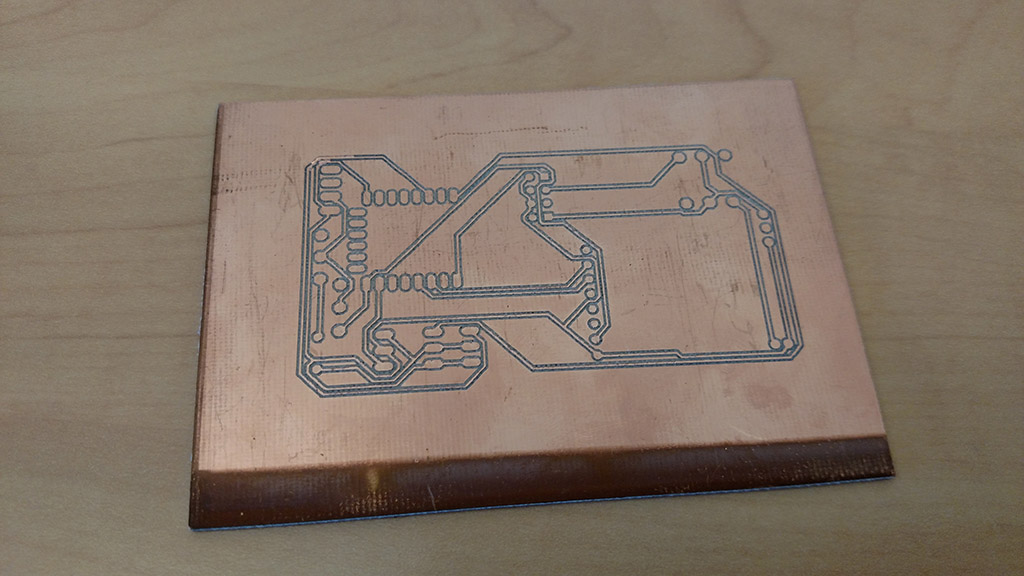
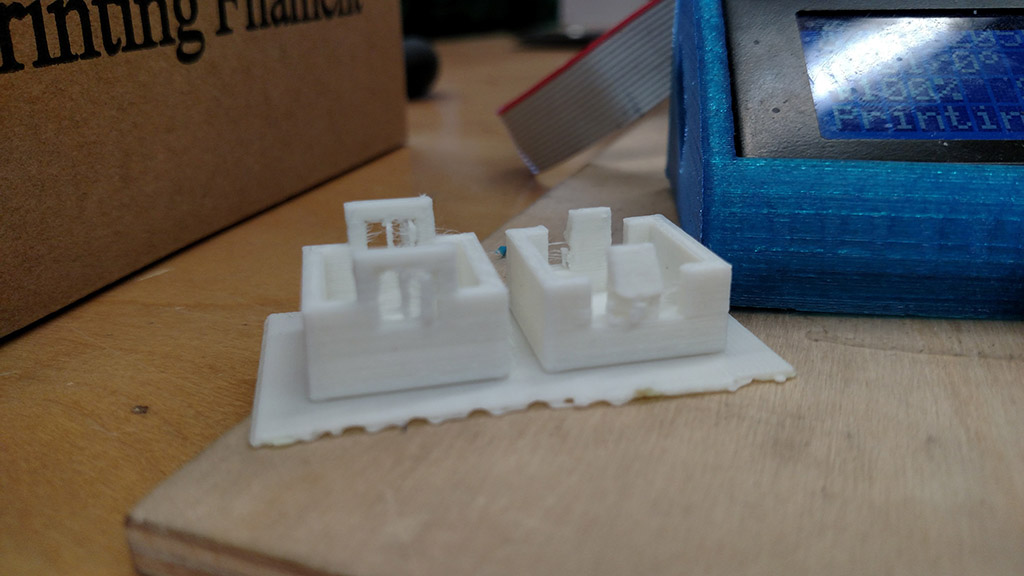
Manufacturing is our top priority! We have been churning out additional circuit boards on the CNC router. The 3D printed core has also seen great progress. We printed our first version (well, half of it anyway) and found a number of aspects that needed improving. V2 is now ready to print this weekend (now with the entire core in a single print job).
Etching a new circuit board.
3D printed core, V1.
Half a V1 core, assembled.
V2, print ready.
Our team also got a chance to talk to Anthony Daniels about the project. He is looking forward to seeing footage of the final product in action!
Unfortunately, we didn’t refine enough in time for a Friday playtest like we had hoped. We’ll aim for early next week instead. The following weekend, we will be showing our work at CMU West’s Carnival, which should give us some good additional testing.
We have continued working towards a stable, durable prototype.
The team ran some more proximity detection tests with the WiFi modules. They seem to be working well to detect a set threshold without too much lag in response time. They should work for our purposes.
During halves, we mentioned the potential for additional testing with Bluetooth and ultrasound to improve our balls’ distance/positional tracking. Unfortunately, the semester is quickly coming to a close. To be able to complete our balls in time, we have to forgo that additional experimentation and simply do the best we can with our current hardware functionality. Activity design will take our limitations into account.
Meanwhile, we’ve launched into the manufacturing phase of our project. Laura has been modeling and 3D printing at TechShop. Zhen brought in his personal CNC router and has been designing and cutting copper circuit board prototypes.
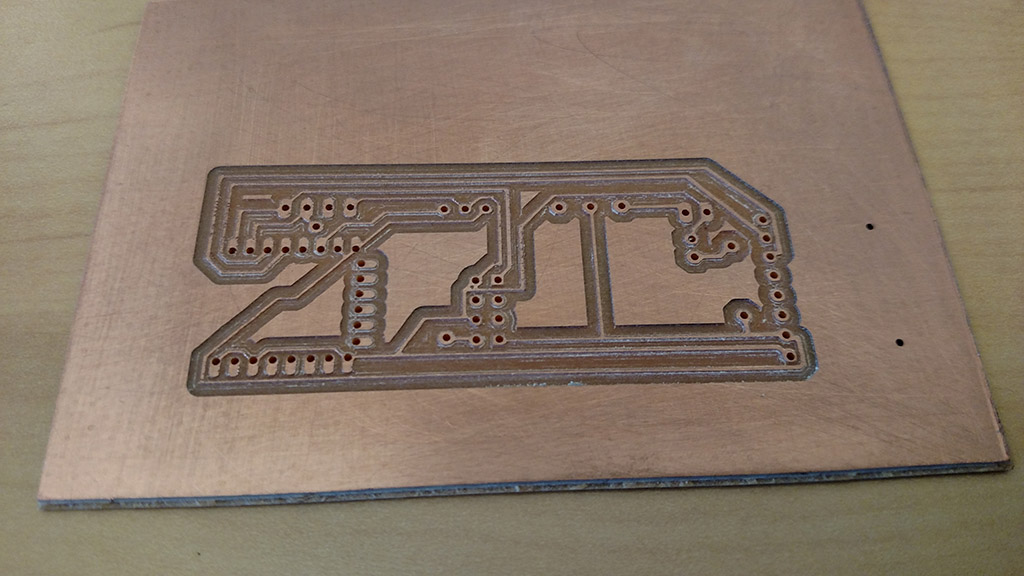
After a few iterations, we have managed to reduce the size of the circuit board. We initially planned to send our circuit designs to a 3rd party to get proper printer circuit boards, however, given our current time constraints, we have decided to just use the copper boards we can cut ourselves.
First circuit board test.
Optimized circuit board.
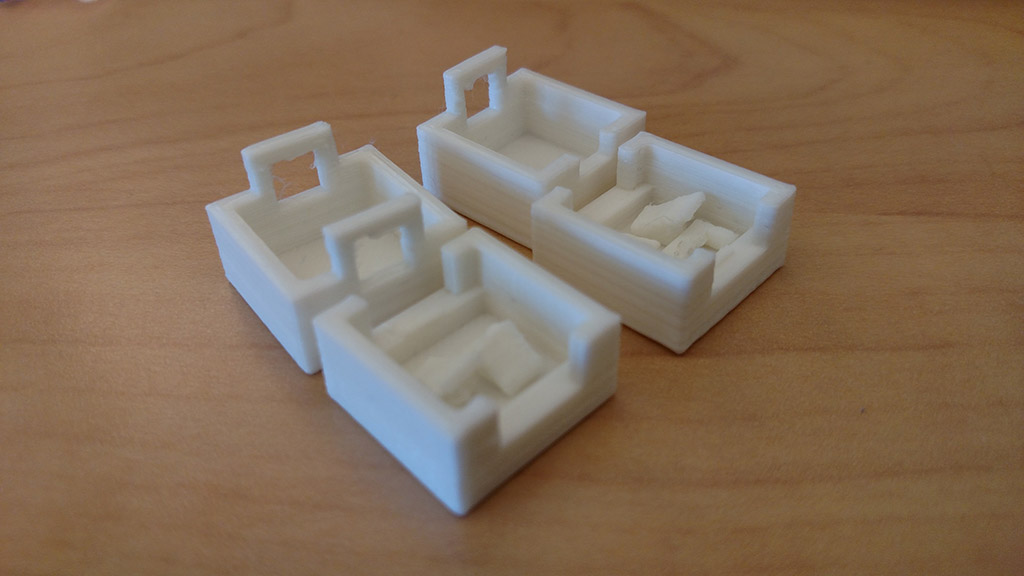
We also made some small test models for the 3D printed shell to test a latching mechanism, printing both with and without support material. Unfortunately, the layered nature of the print made the latch portion break almost instantly rather than flex. They would need to be printed on a different axis to change the grain of the layers, which may not be practical. On the plus side, a nice snug fit between the top and bottom halves seems to keep them together well enough, so we will use that to our advantage instead.
First 3D printed latch test.
Broken latches.
Box held by friction alone.
By the end of this next week, we hope to have everything ready for our first full playtest. The hardware should be assembled with circuit board and shell (or bubble wrap substitute) and our “virus game” activity should be up and running.
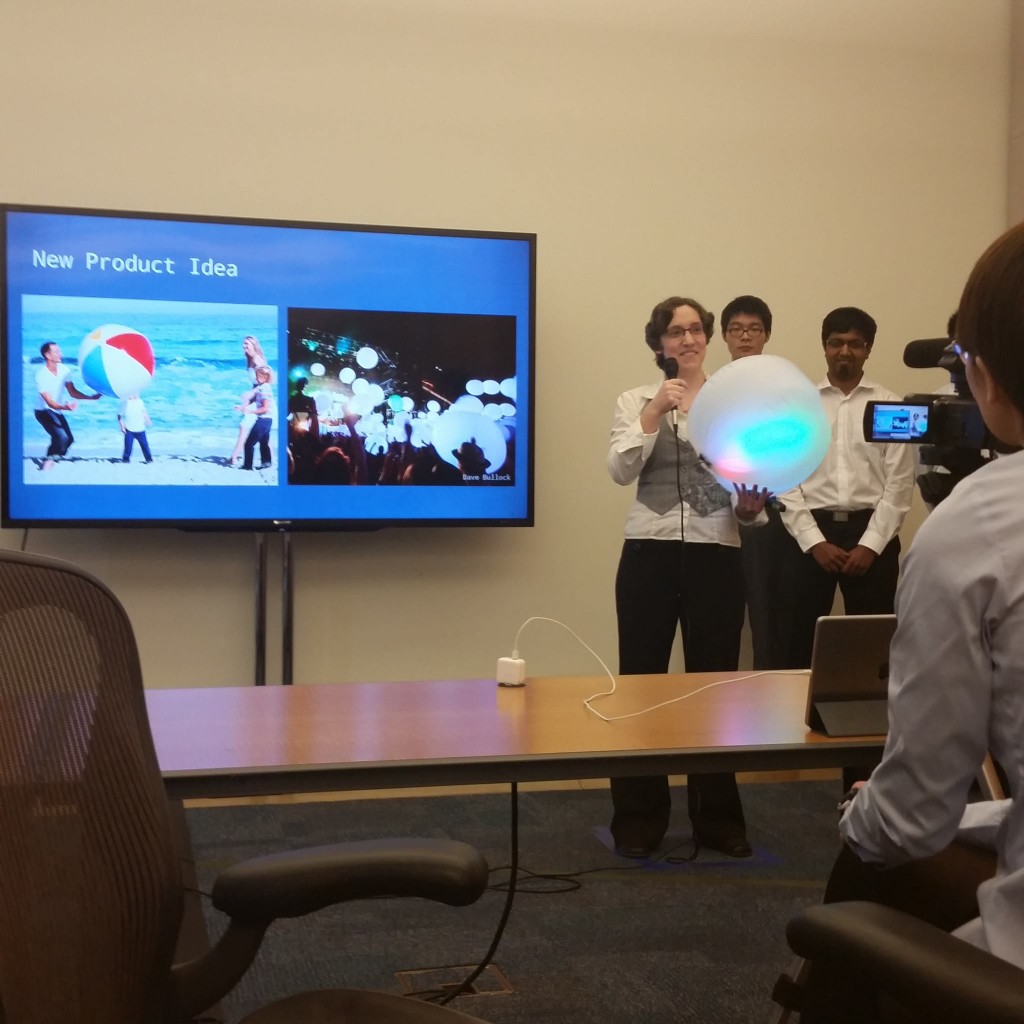
We had the hardware components for 3 of our smart beach balls assembled, plus a simplified randomized-light-sequence version with the hardware inside the ball so people could get a sense of what our final product might feel like.
It was great to see everyone so excited by our idea. Many people wanted to try playing with the balls, especially once they were lit! We had to keep an eye on things to prevent them from trying to pick up the balls with the hardware still hanging out instead of properly installed (and we still didn’t manage to stop everyone!).
Several different faculty members from CMU West stopped by our demo table after the presentation. They gave us great feedback, advice, and recommended resources and contacts to try and help with our proximity/location detection problem we are still working to solve.
After Halves, our team is pushing forward to get these balls built properly! We’ve been designing the custom circuit board we will need to eliminate the messy, less durable wiring and keep our hardware compact. We also found during our prep for Halves that it is difficult to maintain wire contact with the batteries we are using without a proper holster. We will be trying to find or manufacture something to secure that connection. Once that prototype hardware is stabilized and programmed, we can start doing some real play testing. Finally, we are also starting our design for the 3D printed hardware shell.
Soft Opening is only about a month away. We’ve got our work cut out for us!
Last week, the team met with Bob Iannucci at Carnegie Mellon University’s Silicon Valley campus. He has had a lot of experience with small wireless modules. We were able to pick his brain and get a lot of great information about the advantages and limitations of a variety of wireless communication and tracking methods, as well as specific hardware recommendations for our purposes.
Now, after a week of spring break, we’re back and in the final push to Halves!
Animations to convey our concept during our presentation are nearly complete.
We have all the components to make one ball tested and ready to start assembling in a more compact and secure housing. We’ve placed orders for additional balls and hardware so we can assemble multiple smart balls and start testing group behaviors.
Our Halves presentation will be this coming Wednesday, so that is our immediate focus, but we hope to have some live smart balls very soon!
Earlier this week, the team sat down (via video chat) with George Buckenham of Sensible Object, the team behind the smart connected game Fabulous Beasts. He gave us advice about developing our idea, making hardware that works reliably, and designing around technical limitations.
The team has continued working on our hardware and communications setup for the technical core of our smart balls. Larger versions of the inflatable ball are on the way to start trying to load up with tech.
We have also been expanding on the actual behavior of the balls. What specific behavior changes occur? How does the personality manifest itself? Based on the ball’s hardware capabilities, what cues can convey what anthropomorphic emotions and reactions? Answering these questions is key to designing what interacting with these balls feels like. That experience is a big part of our product, so we want to be able to convey it during our upcoming Halves (midterm) presentation. Therefore, our artist is creating a set of small animations to help illustrate and iterate on these interactions prior to the completion of the hardware.
This coming week is our spring break. However, we will still be working on the project. Our team has arranged a meeting with Bob Ianucci. He has personal experience with the Internet of Things and wireless position tracking, so the information and feedback we receive from him will be quite valuable.
We are still exploring the limitations of the hardware itself versus our design. Size, power consumption, accuracy, and functionality all require trade-offs. Once we find the appropriate balance, we can tailor our behavior design accordingly. Most everyone we’ve presented our idea to has been excited to see the results. We aim to meet those expectations!
We are moving forward with our smart, connected balls idea.
We drafted an initial design document, outlining what kinds of capabilities these balls would have, how they would behave, and what sort of hardware might be involved.
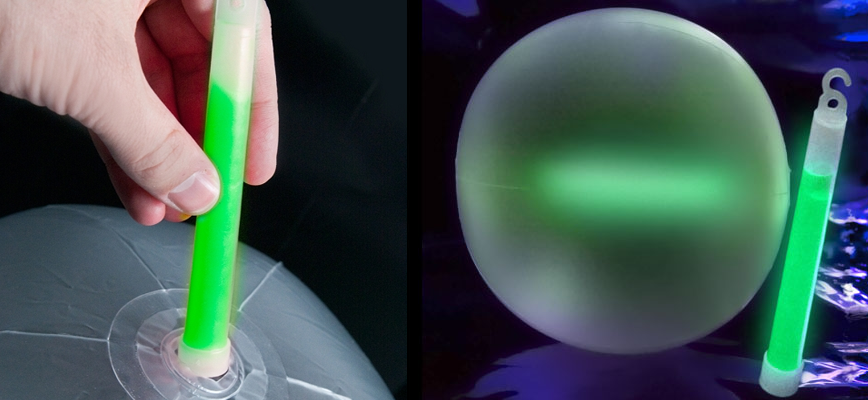
After some searching, we also found an existing product: a beach ball with a central pocket that can hold a glow stick. We’ve acquired one of the smaller versions to take a closer look at and start building some test versions, and it looks promising. We believe this ball will be a great base to work with, so long as we can house all of our hardware inside.
Existing glow stick beach ball product.
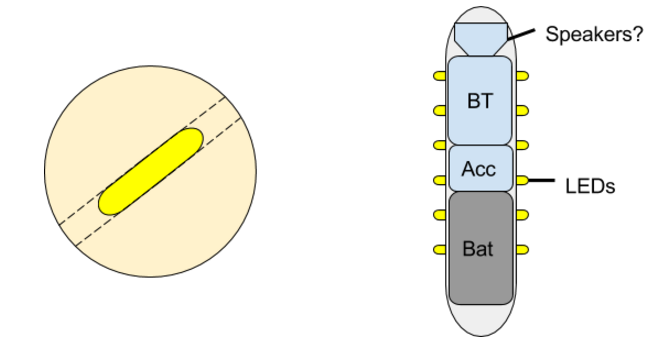
Initial design diagram using existing ball.
Current hardware design using existing ball.
We presented our current physical and behavioral designs to our instructors, and they like the direction we’re going. We have our work cut out for us for the rest of the semester!
The team has also been making progress on the hardware front. We can scan with the WiFi module, and our device can communicate with our central server. Unfortunately, the Bluetooth modules we received were not what we ordered and lacked certain capabilities, so we will have to find new ones before we can continue any Bluetooth development. For now, we will be sticking with WiFi.
Early next week, we aim to have an initial prototype that can communicate with the server, use WiFi to gather proximity data, and possibly make use of an accelerometer.