A big part of the Bowtie development process relies on technology. As you may know, our main goal with this project is to create a flexible and robust interface that would let an operator push certain pre-composed animations to Herb, in order to make him perform the role of an actor.
In the process of creating this interface we have to touch and intersect several technologies.
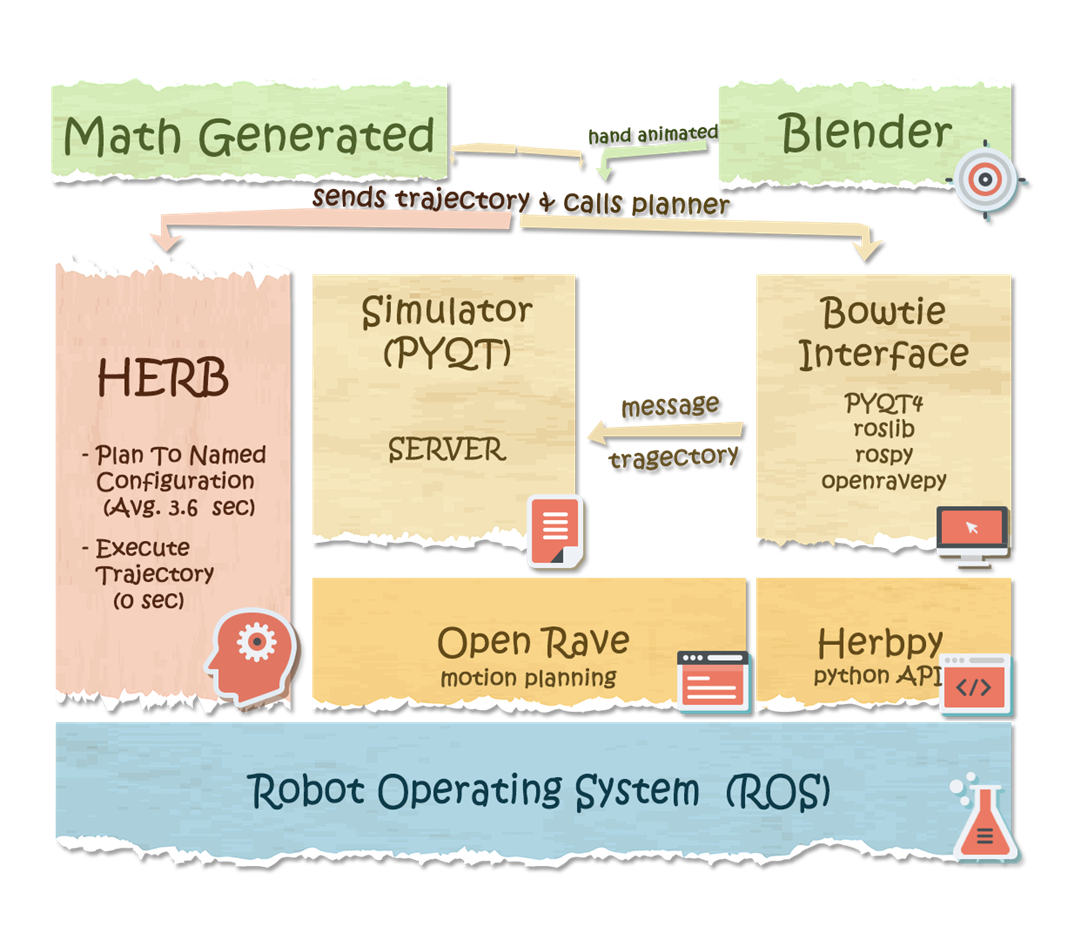
Some of those technologies are the Robot Operating System (Herb’s Core OS), HerbPY (Herb’s Python API), Motion Rave (Motion Planning), Blender (Animation Software) and some others. Bowtie is building the interface using several features and intersctions of those technologies besides the hardware that includes the robot itself.
Below you can find a graphic of how those technologies are layered for the development of our interface.
As always, we’re open for feedback and comments.